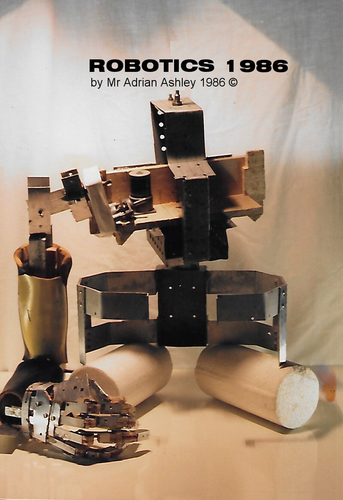
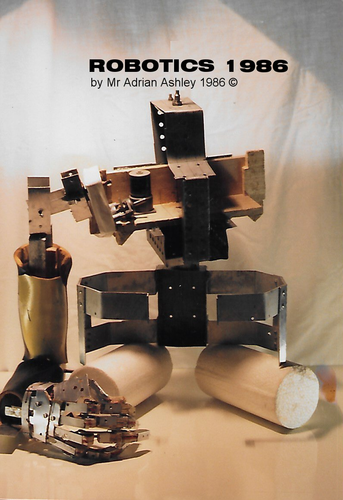
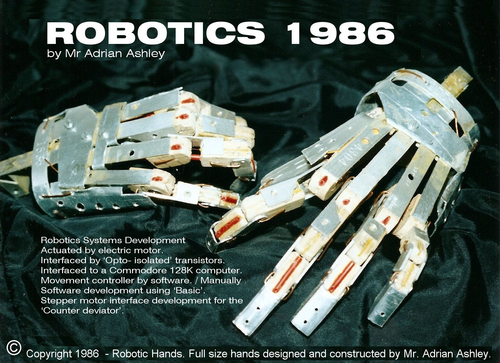

Robotics Systems Development
Actuated by electric motor.
Interfaced by ‘Opto- isolated’ transistors.
Interfaced to a Commodore 128K computer.
Movement controller by software. / Manually
Software development using ‘Basic’.
Stepper motor interface development for the
‘Counter deviator’.
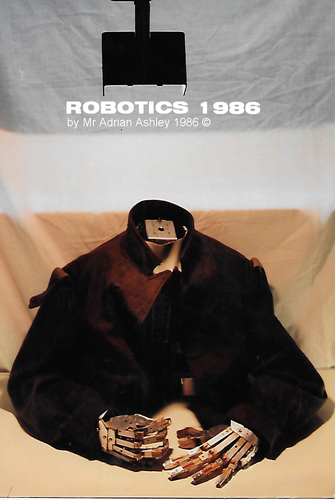
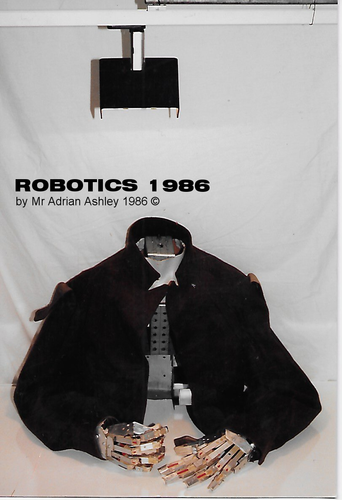
Development in 1986 by Adrian Ashley
Actuated by electric motor.
Interfaced by ‘Opto- isolated’ transistors.
Interfaced to a Commodore 128K computer.
Movement controller by software. / Manually
Software development using ‘Basic’.
Stepper motor interface development for the
‘Counter deviator’.
Development in 1986 by Adrian Ashley
Something went wrong, please try again later.
This resource hasn't been reviewed yet
To ensure quality for our reviews, only customers who have downloaded this resource can review it
Report this resourceto let us know if it violates our terms and conditions.
Our customer service team will review your report and will be in touch.
£0.00